Coverage Factor Definition per the VIM
According to the JCGM 200:2012 (VIM – Vocabulary in Metrology), a coverage factor is a “number larger than one which a combined standard measurement uncertainty is multiplied to obtain an expanded measurement uncertainty.”
Coverage Factor Value per the GUM
According to the JCGM 100:2008 (GUM) section 3.3.7, the coverage k is typically in the range of 2 to 3 and is based on the coverage probability or the required level of confidence.
Coverage Factor and Expanded Measurement Uncertainty
The coverage factor is used to expand a standard measurement uncertainty to a desired level of confidence.
Below, you will see the expanded uncertainty formula. The coverage factor is denoted by the letter “k.”
U = k·uc(y)
This is consistent with section 6.2.1 of the JCGM 100:2008 (GUM). An excerpt is provided below for reference.

Coverage Factor and ISO/IEC 17025 Requirements
Typically, measurement uncertainties are expressed to a 95.45 % confidence interval where the coverage factor k equals two (k=2).
According to the JCGM 100 section G.6, the coverage factor k=2 is recommended when the conditions of the Central Limit Theorem are met to assume a normal distribution.
Otherwise, the coverage factor should be determined using the t-distribution and the effective degrees of freedom per JCGM 100, section G.6.4.
A common nonconformity cited during ISO/IEC 17025 audits involve labs using the coverage factor k=2 instead of the t-distribution when the effective degrees of freedom is less than or equal to 10 per JCGM 100 section G.6.6.
FAQ
How to determine coverage factor k?
There are two ways to determine the coverage factor (See Appendix G in the JCGM 100:2008). These include:
- Method 1: Coverage Factor Table (JCGM 100:2008, section G.1.3):
- Select the desired coverage probability (e.g. 95.45 %),
- Find the associated coverage factor from JCGM 100:2008, Table G.1.
- Method 2: T-distribution (JCGM 100:2008, section G.3):
- Select the desired coverage probability (e.g. 95.45 %),
- Determine the degrees of freedom (v = n – 1),
- Use the Student’s t-distribution or table to obtain the coverage factor.
When to use the t-distribution to find coverage factor k?
According to the JCGM 100:2008 (GUM) section G.6, the coverage factor k should be determined using the t-distribution (i.e. Student’s T distribution) when the conditions of the Central Limit Theorem are not met to assume a normal distribution.
How does confidence level relate to a coverage factor in ISO/IEC 17025?
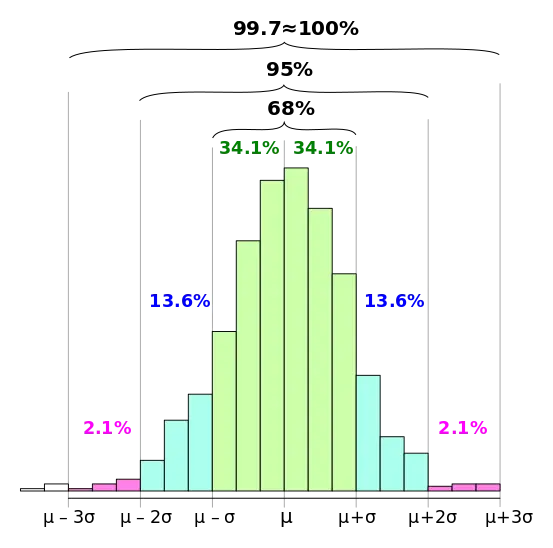
The confidence level is related to the Probability Distribution’s Density function and the number of standard deviations needed to obtain the desired percentage of the probability density function.
This is based on the Empirical Rule (i.e. 68-95-99 rule) in statistics. Look at the image below for an example:
Glossary
- Coverage Factor
- – number larger than one by which a combined standard measurement uncertainty is multiplied to obtain an expanded measurement uncertainty. (Source: JCGM 200:2012, 2.38)
- Level of Confidence
- the likelihood that a set of measurement values are contained within a specified coverage interval. (Source: JCGM 200:2012, 2.37)
- Effective Degrees of Freedom
- the degrees of freedom of the combined standard measurement uncertainty (uc) obtained from the Welch-Satterthwaite formula and used to determine the coverage factor (k) approximated by a t-distribution. (Source: JCGM 100:2008, G.4)
- Probability Distribution
- a function or table that describes the likelihood of all possible outcomes for a random variable associated with an experiment or event.
- Central Limit Theorem
- a concept in probability theory where the distribution of sample means will take the shape of a normal distribution regardless of the underlying distribution if the sample size is large enough.
- Empirical Rule
- a statistical principle that states for a normal distribution, approximately 68.27 % of outcomes will occur within one standard deviation, 95.45 % of outcomes will occur within two standard deviations, and 99.73 % of outcomes will occur within three standard deviations.
- Standard Measurement Uncertainty
- measurement uncertainty expressed as a standard deviation. (Source: JCGM 200:2012, 2.30)
- Expanded Measurement Uncertainty
- the product of a combined standard measurement uncertainty and a factor larger than the number one. (Source: JCGM 200:2012, 2.35)
- Combined Standard Measurement Uncertainty
- standard measurement uncertainty that is obtained using the individual standard measurement uncertainties associated with the input quantities in a measurement model. (Source: JCGM 200:2012, 2.31)